Multi-scale model
for immersed granular flows
M.Henry, N.Coppin, S.Yans
J.Lambrechts, V.Legat
J.Lambrechts, V.Legat
Immersed granular flows ?
- Geophysical flows : magma
- Civil engineering : concrete
- Pharmaceutical industries : drug powder
- Cooking : flour with water
- ...
Solid particles within a fluid


Multi-scale FEM-DEM model
- Solid phase
- Discrete element
- Lagrangian representation
- Insight in contacts physics
- Fluid phase
- Continuous medium
- Eulerian representation
- Computational convenience
- Fluid-grains interaction
- Empirical momentum transfer
MigFlow is a open-source software which supports ...
- Dry granular flow
- Semi-dilute regime
- Dense regime
- Free-surface flow (ALE, mesh adaptation)
- Free-surface with large deformation (PFEM)
- ...
MigFlow is a open-source software which supports ...
- Dry granular flow
- Semi-dilute regime
- Dense regime
- Free-surface flow (ALE, mesh adaptation)
- Free-surface with large deformation (PFEM)
- ...
MigFlow is a open-source software which supports ...
- Dry granular flow
- Semi-dilute regime
- Dense regime
- Two-phase flow
- Free-surface with large deformation (PFEM)
- ...
MigFlow is a open-source software which supports ...
- Dry granular flow
- Semi-dilute regime
- Dense regime
- Two-phase flow
- Free-surface with large deformation (PFEM)
- ...
MigFlow is a open-source software which supports ...
- Dry granular flow
- Semi-dilute regime
- Dense regime
- Two-phase flow
- Free-surface with large deformation (PFEM)
- ...
Non-smooth contact dynamics
to solve collision

- Contact dynamics
- \[ \boldsymbol{M} \left(\boldsymbol{v}^+ - \boldsymbol{v}^-\right) = \boldsymbol{p} \]
- Signorini constraint
- \[ \left(\boldsymbol{v}^+ \cdot \boldsymbol{n}\right) \left(\boldsymbol{p} \cdot \boldsymbol{n} \right) = 0 \]
- Coulomb's friction law
- \[ \lVert \boldsymbol{p} - (\boldsymbol{p} \cdot \boldsymbol{n}) \boldsymbol{n} \rVert \leq \mu \left\vert \boldsymbol{p} \cdot \boldsymbol{n}\right\vert \]
Non-smooth contact dynamics
to solve collision
- Contact dynamics
- \[ \boldsymbol{M} \left(\boldsymbol{v}^+ - \boldsymbol{v}^-\right) = \boldsymbol{p} \]
- Signorini constraint
- \[ \left(\boldsymbol{v}^+ \cdot \boldsymbol{n}\right) \left(\boldsymbol{p} \cdot \boldsymbol{n} \right) = 0 \]
- Coulomb's friction law
- \[ \lVert \boldsymbol{p} - (\boldsymbol{p} \cdot \boldsymbol{n}) \boldsymbol{n} \rVert \leq \mu \left\vert \boldsymbol{p} \cdot \boldsymbol{n}\right\vert \]
Let's have a look at another paradigm...

An explicit coupling is used,
overlapping drives the particle dynamics
overlapping drives the particle dynamics
GPU implementation is done by S. Yans
(more in a next seminar...)
(more in a next seminar...)
Volume averaged equations are solved

- Mass conservation
- \[ \boldsymbol{\nabla} \cdot \left( \color{red}{\phi} \boldsymbol{u_s} \right) + \boldsymbol{\nabla} \cdot \left( \color{red}{\epsilon} \boldsymbol{u} \right) = 0 \]
- Momentum conservation
- \[ \color{red}{\epsilon} \frac{\text{D}\boldsymbol{u}}{\text{d}t} = -\color{red}{\epsilon} \boldsymbol{\nabla} p + \frac{1}{\text{Re}} \boldsymbol{\nabla} \cdot \left[ 2 \color{red}{\epsilon} \boldsymbol{d} (\boldsymbol{u}) \right] + \color{red}{\epsilon} \frac{1}{\text{Fr}^2} \boldsymbol{e_g} + \color{red}{\boldsymbol{f}} \]
Drag force of a multi-particle system ?

- The drag force is characterised by the drag coefficient : \[ F_D \approx C_D \]
- The voidage function extends drag for a mixture :
- \[ \text{C}_D = g(\epsilon) \text{C}_{D,0}(\epsilon \text{Re}) \]
- Voidage function associated to Dallavalle correlation :
- \[ \begin{aligned} &\text{C}_{D,0} = \left(0.63 + \frac{4.8}{\left(\epsilon \text{Re}\right)^{0.5}}\right)^{2} \\ &g(\epsilon) = \epsilon^{-1.8} \end{aligned} \]
Discrete element method tracks particles
- Newton's second law
- \[ \begin{aligned} m_i\frac{\text{d}\boldsymbol{v}_i}{\text{d}t} &= \boldsymbol{F}_e + \boldsymbol{F}_c\\ \end{aligned} \]
- \[ \begin{aligned} \boldsymbol{F}_e &= V_i \left(\rho_i\boldsymbol{g} - \boldsymbol{\nabla} p - \boldsymbol{f}_i\right)\\ \end{aligned} \]
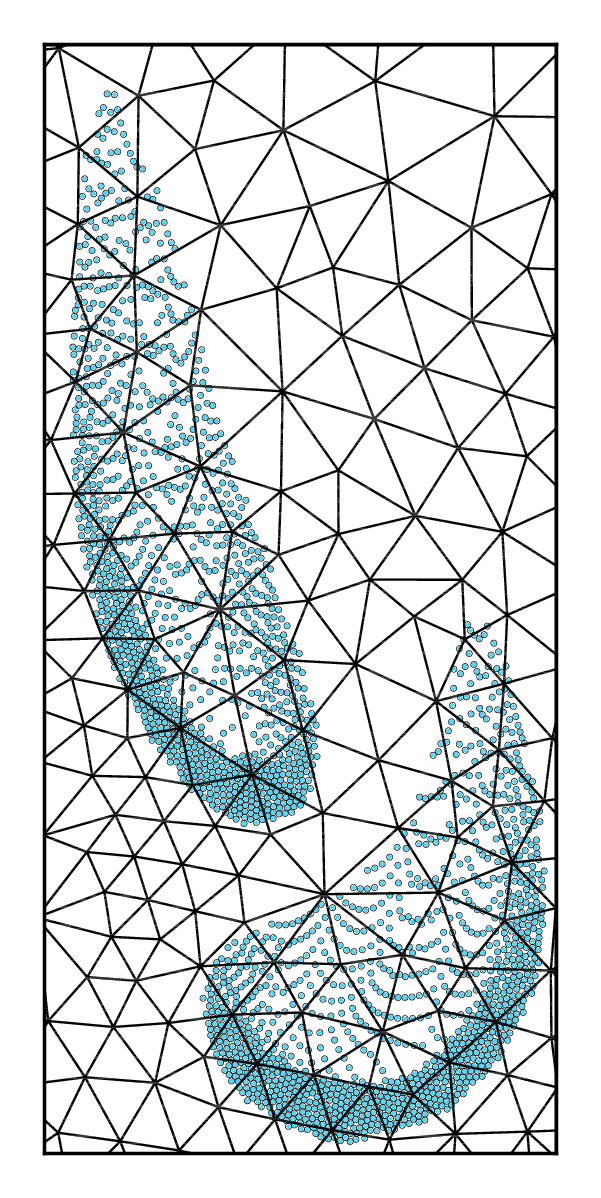
Mesh size is a computational cost parameter
Unresolved
particle size < mesh size
particle size < mesh size
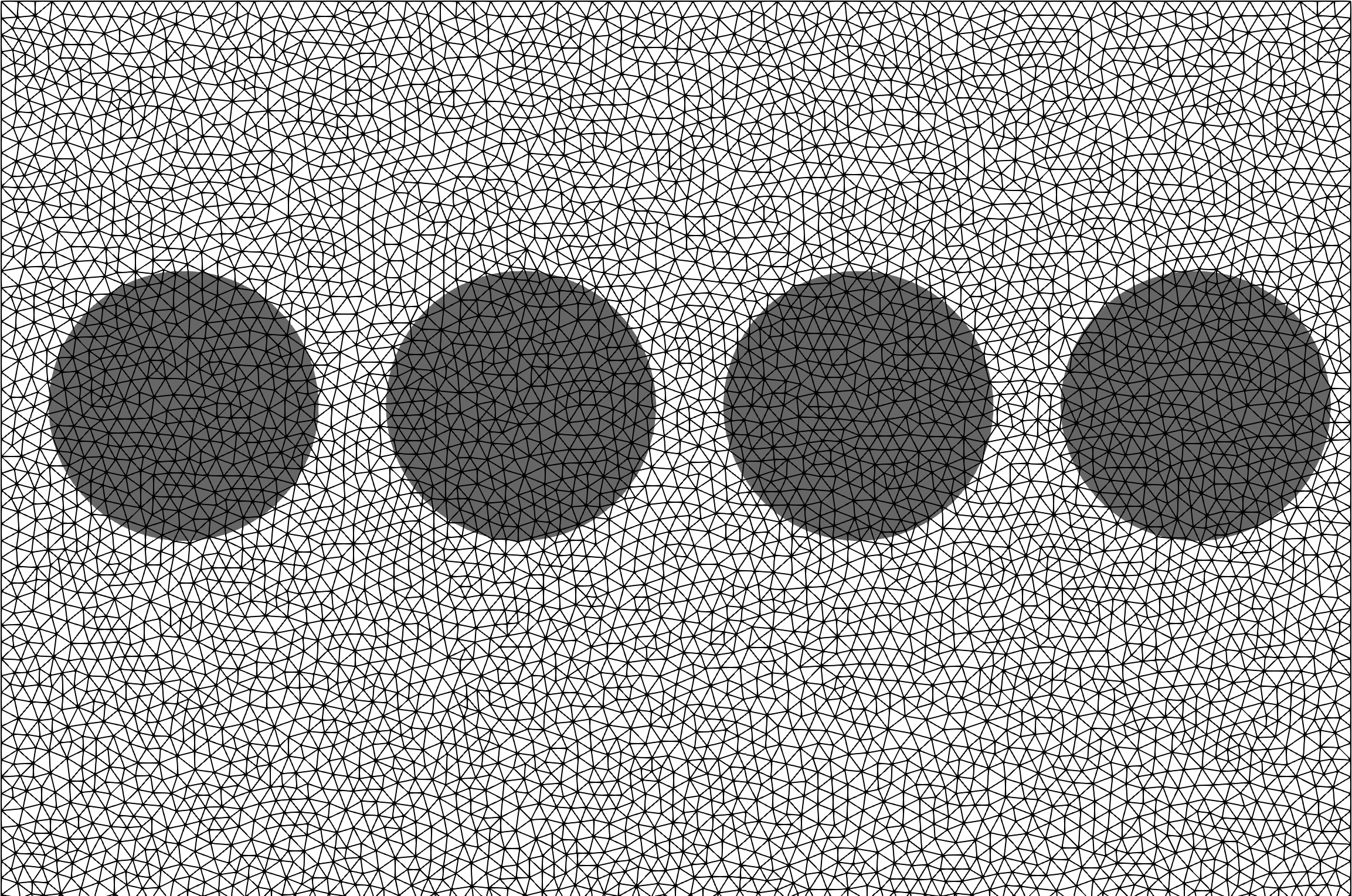
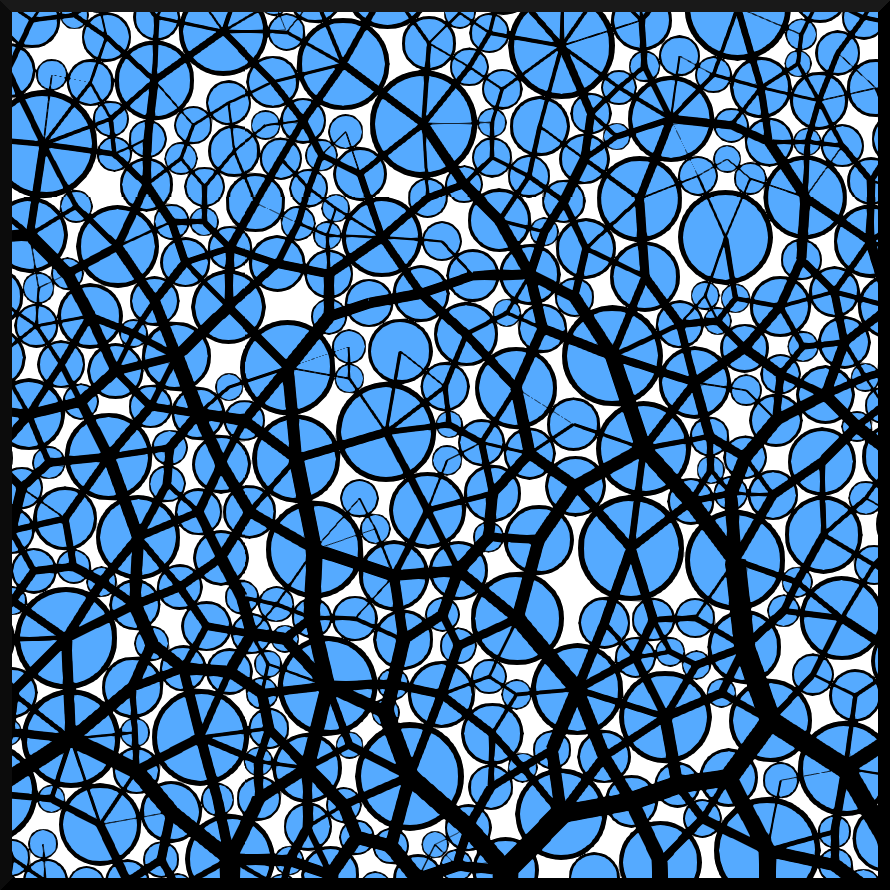
resolved
particle size > mesh size
particle size > mesh size
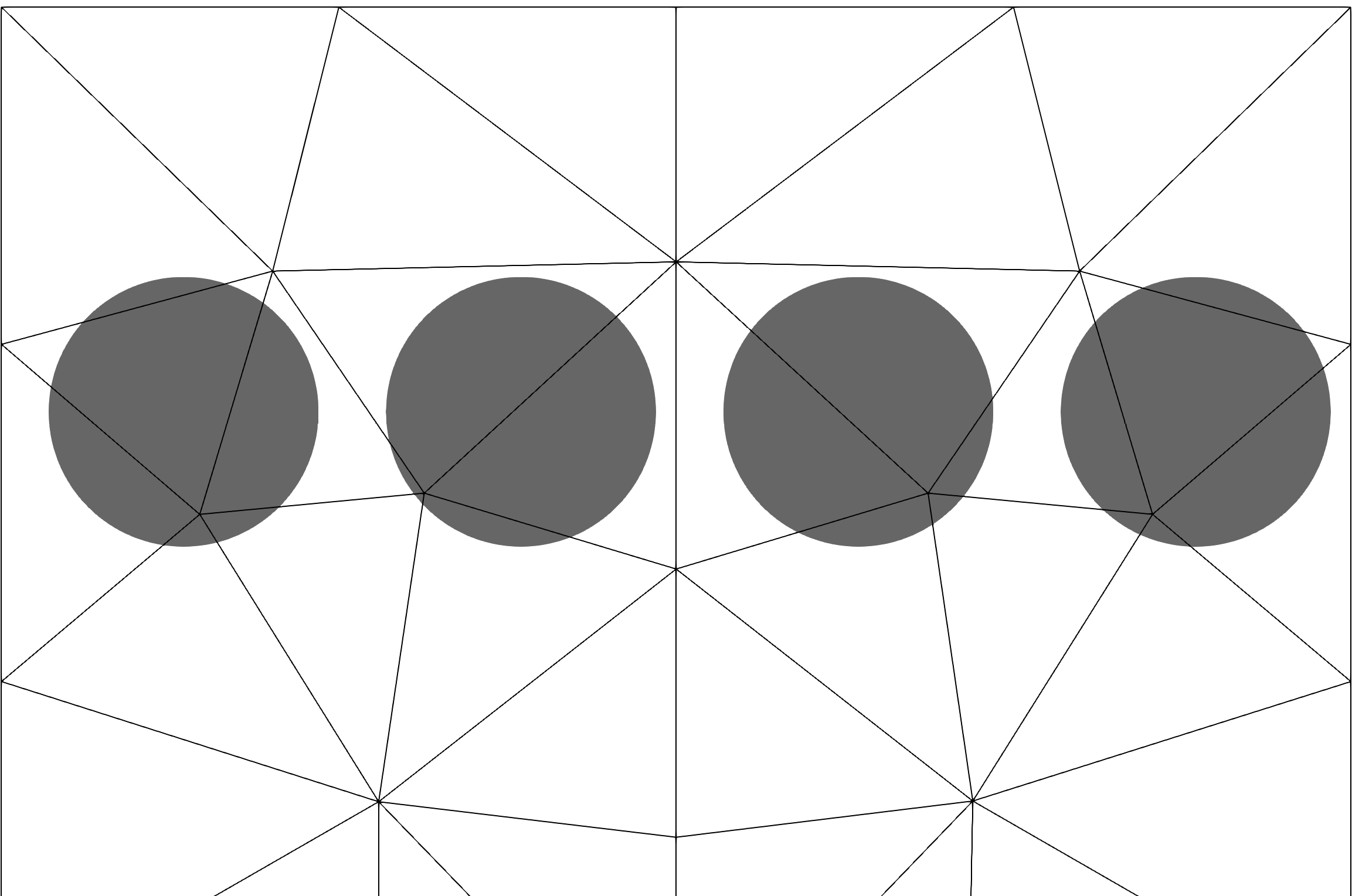
semi-resolved
particle size ~ mesh size
particle size ~ mesh size
At resolved resolution,
how does it behave ?
- Mass conservation, $\epsilon \rightarrow 0$, $\phi \rightarrow 1$ : \[ \begin{aligned} &\boldsymbol{\nabla} \cdot \left( \color{red}{\phi} \boldsymbol{u_s} \right) &+ \boldsymbol{\nabla} \cdot \left( \color{red}{\epsilon} \boldsymbol{u} \right) &= 0 \\ &\boldsymbol{\nabla} \cdot \left(\phantom{\phi} \boldsymbol{u_s} \right) & &= 0 \end{aligned} \]
- Momentum conservation, $\epsilon \rightarrow 0$, $\phi \rightarrow 1$ : \[ \color{red}{\epsilon} \frac{\text{D}\boldsymbol{u}}{\text{d}t} = -\color{red}{\epsilon} \boldsymbol{\nabla} p + \frac{1}{\text{Re}} \boldsymbol{\nabla} \cdot \left[ 2 \color{red}{\epsilon} \boldsymbol{d} (\boldsymbol{u}) \right] + \color{red}{\epsilon} \frac{1}{\text{Fr}^2} \boldsymbol{e_g} + \color{red}{\boldsymbol{f}} \]
- It leads that : \[ \color{red}{\boldsymbol{f}} \triangleq \gamma \left( \boldsymbol{u} - \boldsymbol{u}^s\right) = 0 \]
At resolved resolution,
how does it behave ?
- Mass conservation, $\epsilon \rightarrow 0$, $\phi \rightarrow 1$ : \[ \begin{aligned} &\boldsymbol{\nabla} \cdot \left( \color{red}{\phi} \boldsymbol{u_s} \right) &+ \boldsymbol{\nabla} \cdot \left( \color{red}{\epsilon} \boldsymbol{u}^{\color{blue}{n+1}} \right) &= 0 \\ &\boldsymbol{\nabla} \cdot \left(\phantom{\phi} \boldsymbol{u_s} \right) & &= 0 \end{aligned} \]
- Momentum conservation, $\epsilon \rightarrow 0$, $\phi \rightarrow 1$ : \[ \color{red}{\epsilon} \frac{\text{D}\boldsymbol{u}}{\text{d}t} = -\color{red}{\epsilon} \boldsymbol{\nabla} p^{\color{blue}{n+1}} + \frac{1}{\text{Re}} \boldsymbol{\nabla} \cdot \left[ 2 \color{red}{\epsilon} \boldsymbol{d} (\boldsymbol{u}^{\color{blue}{n+1}}) \right] + \color{red}{\epsilon} \frac{1}{\text{Fr}^2} \boldsymbol{e_g} + \color{red}{\boldsymbol{f}} \]
- It leads that : \[ \color{red}{\boldsymbol{f}} \triangleq \gamma^{\color{blue}{n}} \left( \boldsymbol{u}^{\color{blue}{n+1}} - \boldsymbol{u}^s\right) = 0 \]
How to predict the particle velocity ?
- Newton's second law : \[ m\frac{\text{d}\boldsymbol{u_s}}{\text{d}t} = V_i \left(\rho_i\boldsymbol{g} - \boldsymbol{\nabla} p - \boldsymbol{f}_i\right) + \boldsymbol{F}_c \]
- Drag force : \[ \color{red}{\boldsymbol{f}} \triangleq \gamma^{\color{blue}{n}} \left( \boldsymbol{u}^{\color{blue}{n+1}} - \boldsymbol{u_s}\right) \]
- A semi-implicit scheme is used : \[ \begin{aligned} m\frac{\boldsymbol{u_s}^{\color{blue}{*}} - \boldsymbol{u_s}^{\color{blue}{n}}}{\Delta t} = &V_i \left(\rho_i\boldsymbol{g} - \boldsymbol{\nabla} p^{\color{blue}{n+1}} - \gamma^{\color{blue}{n}} \left( \boldsymbol{u}^{\color{blue}{n+1}} - \boldsymbol{u_s}^{\color{blue}{*}}\right) \right)\\ &+ \boldsymbol{F}_c^{\color{blue}{n}} \end{aligned} \]
- $\boldsymbol{u_s}^{\color{blue}{*}}$ provides the link with the pressure field
Granular Rayleigh-Taylor instabilities
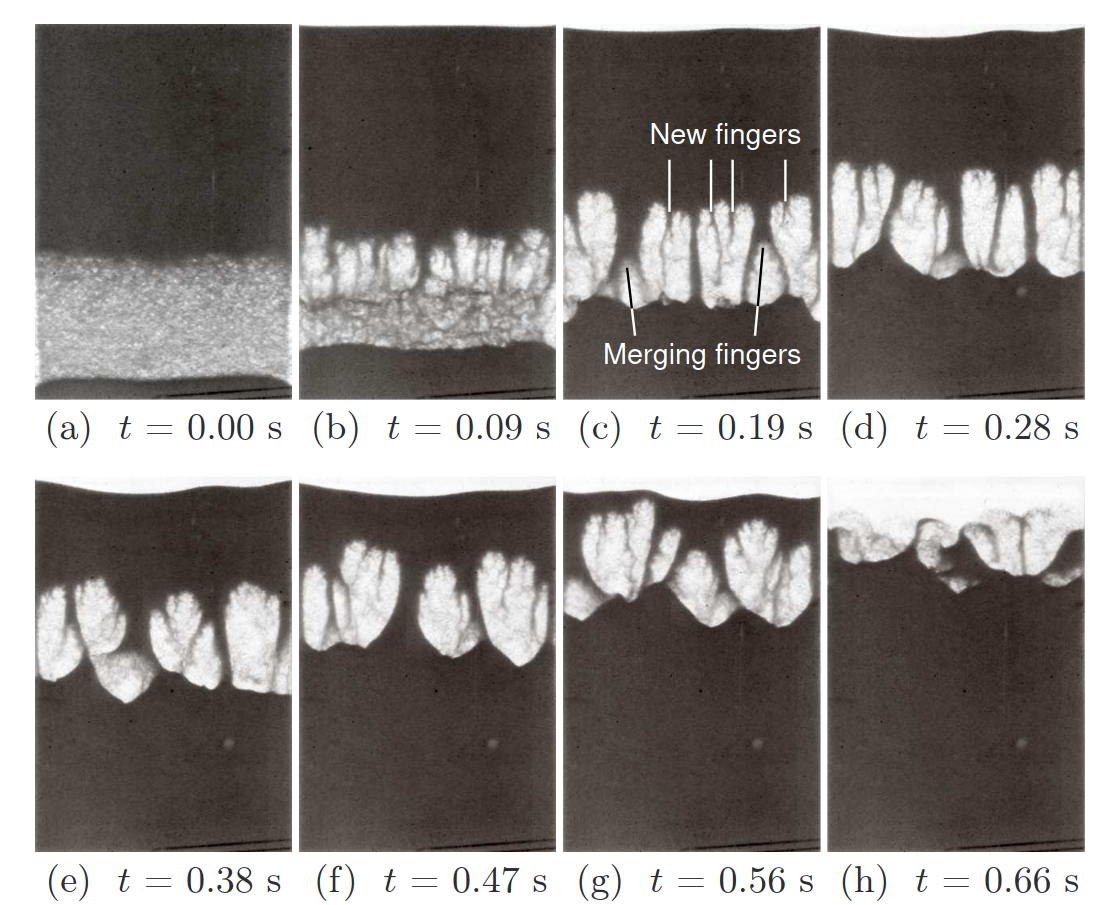
Granular Rayleigh-Taylor instabilities
A water droplet can dig into a granular bed
Granular bed is fluidized by Leidenfrost effect
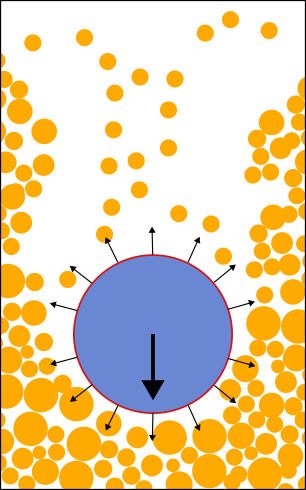
The droplet digs up to 10 times its radius
Its depth depends on the granular temperature
An additional equation to solve
- Mass conservation
- \[ \frac{\partial \color{red}{\epsilon}}{\partial t} + \boldsymbol{\nabla} \cdot \left( \color{red}{\epsilon} \boldsymbol{u} \right) = 0 \]
- Momentum conservation
- \[ \color{red}{\epsilon} \frac{\text{D}\boldsymbol{u}}{\text{d}t} = -\color{red}{\epsilon} \boldsymbol{\nabla} p + \frac{1}{\text{Re}} \boldsymbol{\nabla} \cdot \left[ 2 \color{red}{\epsilon} \boldsymbol{d} (\boldsymbol{u}) \right] + \color{red}{\epsilon} \frac{1}{\text{Fr}^2} \boldsymbol{e_g} + \color{red}{\boldsymbol{f}} \]
- Energy conservation
- \[ \color{red}{\epsilon} \frac{\text{D}T}{\text{d}t} = \frac{1}{\text{Pr}\ \text{Re}} \boldsymbol{\nabla} \cdot \left[ \color{red}{\epsilon} \boldsymbol{\nabla} T \right] + \color{red}{q} \]
Reynolds analogy is valid for particles within air
Reynolds analogy is valid for particles within air

Let's investigate the droplet
